Figure 1
Download original image
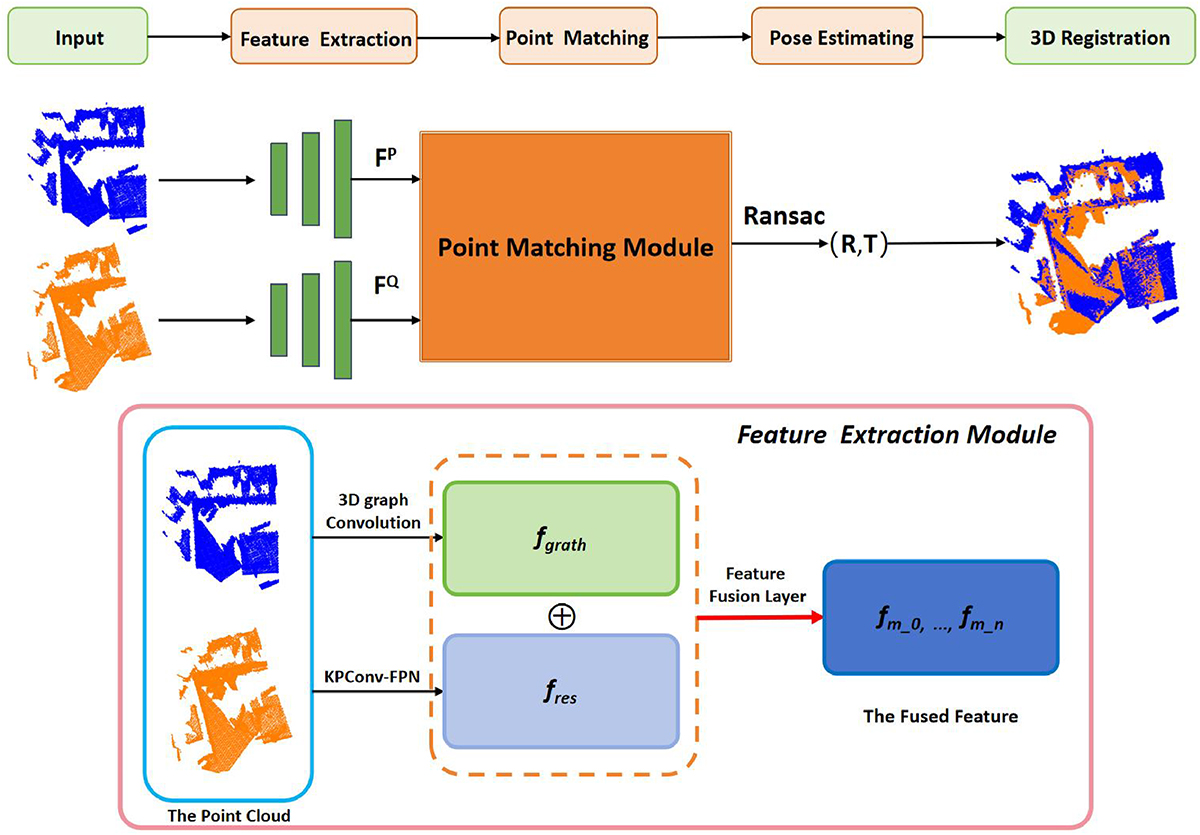
Firstly, perform feature extraction on the two groups of input point clouds to obtain the feature representations F P and F Q respectively. Then, the point matching module completes the point correspondence relationship mining based on the features. Subsequently, the RANSAC algorithm is used for pose estimation to solve the transformation parameters (R, T) (rotation, translation). Finally, the 3D registration of the two groups of point clouds was completed based on this transformation to achieve point cloud alignment.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.